1 ę²čį
ųŲäė╠ż░ÕĄ─ĮYśŗ┐╔ęį║å╗»×ķŲš═©Ą─▀BŚU▀\äėÖCśŗŻ¼į┌▀Mąą╠ż░ÕĻPµI│▀┤ńįOėŗĢrŻ¼ėą▌^ČÓĄ─ęčų¬▓óŪę├„┤_Ą─▌ö╚ļŚl╝■Ż¼Ą½ūŅ╝čĄ─įOėŗģóöĄ▓ó▓╗╩Ū╬©ę╗Ą─öĄųĄŻ¼Č°╩Ūį┌ę╗éĆ║Ž└ĒĄ─ĘČć·ā╚ĪŻ│ŻęÄĄ─įOėŗ╦╝┬ĘąĶę¬▀Mąą▌^ČÓĄ─öĄīWėŗ╦ŃŻ¼▓óŪęę¬Ę┤Å═ėŗ╦ŃĪóų▓Į▒ŲĮ³▓┼─▄╩╣įOėŗ│▀┤ń▀_ĄĮ║Ž└ĒĄ─ĘČć·ĪŻ
«öĮ±ėŗ╦ŃÖC▌oų·▄ø╝■ęčĮøĄ├ĄĮ╚½├µŲš╝░Ż¼▒Š╬─└¹ė├Siemens NXĄ─▓▌łDĘų╬÷╣”─▄Ż¼┐ņ╦┘Īó£╩┤_Ąž┤_Č©ųŲäė╠ż░ÕĄ─ĻPµIįOėŗ│▀┤ńĪŻ
2 ųŲäė╠ż░ÕĮYśŗ║åĮķ
ųŲäė╠ż░ÕĮYśŗ╚ńłD1╦∙╩ŠŻ¼ųŲäė╠ż░Õ╝░ų¦╝▄╬╗ė┌±{±é┼ōā╚é╚Ż¼═©│ŻŪķørŽ┬Ż¼╬ó▄ćĄ─šµ┐šų·┴”Ų„l╬╗ė┌±{±é┼ō═Ōé╚Ą─Ū░ĘĮŻ¼ųŲäė╠ż░Õų¦╝▄3║═šµ┐šų·┴”Ų„l═¼╣╠Č©į┌▄ć╔ĒŌkĮā╚═Ōā╔é╚ĪŻųŲäė╠ż░ÕŚU7┼cšµ┐šų·┴”Ų„═ŲŚU5═©▀^õN▌S║═┐©╗╔ŽÓ▀BĪŻųŲäėĢrŻ¼±{±éåTė├─_▓╚Ž┬ųŲäė╠ż░Õ─_╠żē|Ż¼╠ż░Õ└@╗ž▐Dųąą─4─µĢrßśą²▐DŻ¼═©▀^▌SõN═Ųäėšµ┐šų·┴”Ų„═ŲŚUŽ“Ū░▀\äėĪŻšµ┐šų·┴”Ų„╔Žėą╣▄┬Ę┼c░läėÖC▀MÜŌŲń╣▄ŽÓ▀BĮėŻ¼ų·┴”Ų„┐╔ęįĮĶų·░läėÖC▀MÜŌŲń╣▄ā╚Ą─šµ┐šČ╚īó±{±éåTĄ─▓╚╠ż┴”Ę┼┤¾▓óé„▀fĮoųŲäėų„Ėūā╚▓┐Ą─╗Ņ╚¹Ż¼╗Ņ╚¹ļSų«Ž“Ū░▀\äė╩╣ų„Ėūā╚Ą─ųŲäėę║┴„äėŻ¼Å─Č°╩╣ų„Ėūā╚ųŲäėę║═©▀^ųŲäė╣▄┬ĘĄĮ▀_Ė„▄ć▌åĄ─ųŲäėĘųĖūŻ¼ųŲäėĘųĖū═ŲäėųŲäėŲ„╣żū„īŹ¼F£p╦┘ųŲäėĪŻ

łD1 │ķäė╠ż░ÕĮYśŗ╩ŠęŌłD
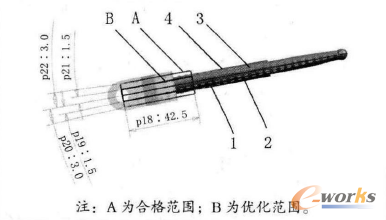
3 ųŲäė╠ż░ÕįOėŗ▌ö╚ļŚl╝■║═Ų┌═¹ĮY╣¹
╚ńłD2╦∙╩ŠŻ¼ęčų¬▌ö╚ļŚl╝■╚ńŽ┬ĪŻ
Ż©1Ż®╔Žų╣³cųąą─2║═Ž┬ų╣³cųąą─lĄ─╬╗ų├Ż║š¹▄ć┐é¾w▓╝ų├Ė∙ō■╚╦ÖC╣ż│╠ę¬Ū¾ųĖČ©Ą─ęčų¬³cĪŻ
Ż©2Ż®═ŲŚUąą│╠P18=42.5mmŻ╗╬ó▄ćĄ─šµ┐šų·┴”Ų„═©│ŻĖ∙ō■¼Fėąą═╠¢▀xą═Ż¼ųŲäėų„ĖūĄ─ĖūÅĮ║═╗Ņ╚¹ąą│╠ätė╔š¹▄ćųŲäėŽĄĮyģóöĄŲź┼õ║¾┤_Č©×ķP18=42.5mmĪŻšµ┐šų·┴”Ų„║═ųŲäėų„Ėūū„×ķę╗éĆ┐é│╔▓┐╝■Ż¼Ųõ╬╗ų├═©│Żė╔š¹▄ć┐é¾w▓╝ų├▀xČ©Ż¼═ŲŚUĄ─ąą│╠║═ųŲäėų„Ėū╗Ņ╚¹Ą─ąą│╠ę╗ų┬ĪŻ
Ż©3Ż®═ŲŚUį╩įSĄ─ö[äė┴┐R≤3°šµ┐šų·┴”Ų„╝╝ągę¬Ū¾ųąĄ─├„┤_ę¬Ū¾ĪŻ
Ż©4Ż®╠ż░ÕĖ▄ŚU▒╚S=Ll/L2=2.93Ż╗ė╔š¹▄ćųŲäėŽĄĮyģóöĄŲź┼õįOėŗł¾ĖµųĖČ©ĪŻ
╬┤ų¬ģóöĄŻ║³c3║═³c4Ą─Š▀¾w╬╗ų├Ż¼╝┤╠ż░ÕģóöĄįOėŗę¬┤_Č©Ą─ā╚╚▌ĪŻ
─┐ś╦ģóöĄĘų╬÷Ż║łD2ėę░ļ▓┐Ęų×ķ═ŲŚUĄ─Ę┼┤¾łDŻ¼ęčų¬Śl╝■║══ŲŚUį╩įSĄ─ö[äė┴┐R≤3°Ż¼īó═ŲŚUĄ─▌SŠĆ╔ŽŠĆö[äė3°▓óīóö[äė║¾Ą─ā╔ų▒ŠĆČ╦³cŽÓ▀Bū„×ķŠžą╬AĄ─Č╠▀ģŻ¼ęį═ŲŚUąą│╠P18Ż║42.5mm×ķŠžą╬AķL▀ģŻ¼ätūŅĮK³c3Ą─▀\äė▄ē█E═Ļ╚½┬õį┌Šžą╬AĘČć·ā╚Š═┐╔ęį▀_ĄĮįOėŗ─┐Ą─ĪŻ
łD2ųąŠžą╬Bę¬Ū¾═ŲŚUĄ─ö[äė┴┐▓╗┤¾ė┌1.5°×ķ┴╦▀_ĄĮįOėŗūŅāׯ¼ūŅ┤¾Ž▐Č╚Ąž╠ßĖ▀é„äėą¦┬╩Ż¼£p╔┘═ŲŚUŪ“Ņ^─źōpŻ¼╣Pš▀ę¬Ū¾³c3Ą─▀\äė▄ē█E═Ļ╚½┬õį┌Šžą╬BųąĪŻ
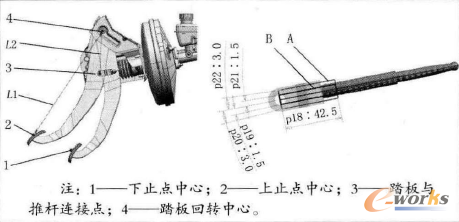
łD2 ųŲäė╠ż░Õęčų¬▌ö╚ļŚl╝■
4 NX▓▌łD╣”─▄║åĮķ
Siemens NXĄ─Ū░╔ĒNX╩ŪCAID/CAD/CAM/CAEę╗¾w╗»Ą─╚²ŠSģóöĄ╗»Ė▀Č╦▄ø╝■Ż¼ūįÅ─1990─Ļ▀M╚ļųąć°╩ął÷ęįüĒŻ¼░lš╣čĖ╦┘Ż¼¼FęčÅVĘ║æ¬ė├ė┌ųąć°Ą─║Į┐šĪó║Į╠ņĪóŲ¹▄ćĪóįņ┤¼╝░ļŖūėĄ╚╣żśIŅIė“Ż¼ŲõųąęįCAD╣”─▄Ą─æ¬ė├▌^ÅVĪŻ
NXųąĄ─▓▌łDŻ©SketchŻ®╩ŪųĖ┼cīŹ¾w─Żą═ŽÓĻP┬ōĄ─Č■ŠSłDą╬ĪŻ╦³┐╔ęį═©▀^ī”Į³╦ŲĄ─Ū·ŠĆ▌å└¬▀Mąą│▀┤ń║═Äū║╬╝s╩°üĒ£╩┤_Ąž▒Ē▀_įOėŗĤĄ─įOėŗęŌłDŻ¼į┘▌oęį└Ł╔ņŻ©Extruded BodyŻ®Īóą²▐DŻ©Revolved BodyŻ®║═Æ▀├ĶŻ©Sweep along GuideŻ®Ą╚īŹ¾wĮ©─ŻĘĮĘ©üĒäōĮ©─Żą═ĪŻ
ę╗░ŃŪķørŽ┬Ż¼ė├æ¶Ą─╚²ŠSĮ©─ŻČ╝╩ŪÅ─äōĮ©▓▌łDķ_╩╝Ż¼╝┤Ž╚└¹ė├▓▌łD╣”─▄äōĮ©│÷╠žš„Ą─┤¾┬įą╬ĀŅŻ¼į┘└¹ė├▓▌łDĄ─Äū║╬║═│▀┤ń╝s╩°╣”─▄Ż¼Š½┤_įOų├▓▌łDĄ─ą╬ĀŅ║═│▀┤ńĪŻ└LųŲ▓▌łD═Ļ│╔║¾╝┤┐╔└¹ė├└Ł╔ņĪó╗ž▐D╗“Æ▀┬ėĄ╚╣”─▄Ż¼äōĮ©┼c▓▌łDĻP┬ōĄ─īŹ¾w╠žš„ĪŻė├æ¶┐╔ęįī”▓▌łDĄ─Äū║╬╝s╩°║═│▀┤ń╝s╩°▀Mąąą▐Ė─Ż¼Å─Č°┐ņ╦┘Ė³ą┬─Żą═ĪŻ
▒Š╬─ų„ę¬ė├Ą─▓▌łD├³┴Ņėą│▀┤ń╝s╩°ĪóÄū║╬╝s╩°Īó▒Ē▀_╩Į3ŅÉĪŻ
│▀┤ń╝s╩°Ż║│▀┤ń╝s╩°ė├ė┌┐žųŲę╗éĆ▓▌łDī”Ž¾Ą─│▀┤ń╗“2éĆī”Ž¾ķgĄ─ĻPŽĄŻ¼ŽÓ«öė┌ī”▓▌łDī”Ž¾Ą─│▀┤ńś╦ūóĪŻ┼c│▀┤ńś╦ūó▓╗═¼ų«╠Äį┌ė┌Ż¼│▀┤ń╝s╩°┐╔ęį“īäė▓▌łDī”Ž¾Ą─│▀┤ńŻ¼╝┤Ė∙ō■ĮoČ©│▀┤ń“īäėĪóŽ▐ųŲ║═╝s╩°▓▌łDī”Ž¾Ą─ą╬ĀŅ║═┤¾ąĪĪŻ
NX▓▌łDĄ─│▀┤ń╝s╩°├³┴Ņ║═╣”─▄┼e└²╚ńłD3╦∙╩ŠĪŻ
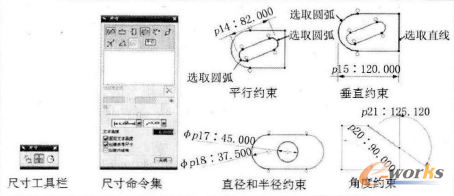
łD3 NX▓▌łD│▀┤ń╝s╩°╣żŠ▀Ö┌╝░╣”─▄┼e└²
Äū║╬╝s╩°Ż║Äū║╬╝s╩°ė├ė┌Č©┴x▓▌łDī”Ž¾Ą─Äū║╬╠žąį║═┤_Č©▓▌łDī”Ž¾ų«ķgĄ─ŽÓ╗źĻPŽĄŻ¼└²╚ńį┌─│éĆĘĮŽ“╔Ž╣╠Č©Īó┼c─│éĆī”Ž¾ŽÓŪą╗“┼c─│éĆī”Ž¾┤╣ų▒║═ŲĮąąĄ╚ĪŻį┌NXųąŻ¼ŽĄĮy╠ß╣®┴╦20ĘNŅÉą═Ą─Äū║╬╝s╩°ĪŻĖ∙ō■▓╗═¼Ą─▓▌łDī”Ž¾Ż¼┐╔╠Ē╝ė▓╗═¼Ą─Äū║╬╝s╩°ŅÉą═ĪŻ
▒Ē▀_╩ĮŻ║▒Ē▀_╩Į╩ŪNXĄ─ę╗éĆ╣żŠ▀Ż¼╩Ūė├ė┌┐žųŲ─Żą═ģóöĄĄ─öĄīW▒Ē▀_╩Į╗“Śl╝■šZŠõĪŻ╦³Ą─Ą╚╩Įū¾é╚▒žĒÜ╩Ūę╗éĆ║åå╬Ą─ūā┴┐Ż¼Ą╚╩Įėęé╚╩Ūę╗éĆöĄīWšZŠõ╗“ę╗éĆŚl╝■šZŠõĪŻ═©▀^╦Ńąg║═Śl╝■▒Ē▀_╩ĮŻ¼ė├æ¶┐╔ęį┐žųŲ▓┐╝■Ą─╠žąįŻ¼└²╚ń┐žųŲ▓┐╝■Ą─╠žš„╗“ī”Ž¾Ą─│▀┤ńĪŻ═©▀^▒Ē▀_╩Į▓╗Ą½┐╔ęį┐žųŲ▓┐╝■ųą╠žš„┼c╠žš„ų«ķgĪóī”Ž¾┼cī”Ž¾ų«ķgĪó╠žš„┼cī”Ž¾ų«ķgĄ─ŽÓ╗ź│▀┤ń┼c╬╗ų├ĻPŽĄŻ¼Č°Ūę┐╔ęį┐žųŲčb┼õųąĄ─▓┐╝■┼c▓┐╝■ų«ķgĄ─│▀┤ń┼c╬╗ų├ĻPŽĄĪŻ
▒Ē▀_╩ĮĄ─ĮM│╔Ż║▒Ē▀_╩Įė╔2éĆ▓┐ĘųĮM│╔Ż¼ū¾é╚×ķūā┴┐├¹Ż¼ėęé╚×ķĮM│╔▒Ē▀_╩ĮĄ─ūųĘ¹┤«ĪŻ▒Ē▀_╩ĮūųĘ¹┤«Įøėŗ╦Ń║¾īóųĄ┘xėĶū¾é╚Ą─ūā┴┐ĪŻ
▒Ē▀_╩ĮĄ─ŅÉą═Ż║╦ŃöĄ▒Ē▀_╩ĮŻ¼╚ńPl=5+8×sin45°Ż╗Śl╝■▒Ē▀_╩ĮŻ¼╚ńwidth=ifŻ©length<100Ż®Ż©60Ż®elseŻ©40Ż®Ż╗Äū║╬▒Ē▀_╩ĮŻ¼╚ńP3=lengthŻ©3Ż®ĪŻ
5 └¹ė├NX▓▌łDĘų╬÷╣”─▄┤_Č©╠ż░ÕģóöĄĄ─▀^│╠
┤_Č©╠ż░Õ┼c═ŲŚU▀BĮėõNŲ┌═¹╬╗ų├Ą─ĘČć·ĪŻ
╚ńłD4╦∙╩ŠŻ¼ęįų·┴”Ų„═ŲŚUĄ─ųąą─ŠĆ×ķ╗∙£╩Ż¼ā╔é╚Ė„ū÷2Śl╣▓4Śl╠ōŠĆŻ¼└¹ė├Äū║╬╝s╩°Ą─╣▓³c├³┴Ņīó4Śl╠ōŠĆėęé╚Ą─Č╦³c┼cų·┴”Ų„═ŲŚUĄ─ųąą─ŠĆėęé╚Ą─Č╦³cįO×ķ“╣▓³c”Ż╗└¹ė├Äū║╬╝s╩°Ą─Ą╚ķL├³┴Ņīó4Śl╠ōŠĆ┼cų·┴”Ų„═ŲŚUĄ─ųąą─ŠĆįO×ķ“Ą╚ķL”Ż╗į┘└¹ė├│▀┤ń╝s╩°Ą─ĮŪČ╚├³┴Ņīó4Śl╠ōŠĆ┼cųąą─ŠĆĄ─ĮŪČ╚įOų├×ķp19=1.5°Īóp20=3°Īóp21=1.5°Īóp22=3°ĪŻ
łD4 ╠ż░Õ┼c═ŲŚU▀BĮėõN─┐ś╦╬╗ų├
īó╠ōŠĆ1║═4ū¾é╚Č╦³c▀BĮė▓óęį┤╦×ķŠžą╬Č╠▀ģŻ¼ķL▀ģŲĮąąė┌ųąą─ŠĆŪęŲõķLČ╚×ķų„Ėū╗Ņ╚¹ąą│╠P18=42.5mmŻ¼Ą├│÷Šžą╬A×ķ╠ż░Õ┼c═ŲŚU▀BĮėõN─┐ś╦╬╗ų├Ą─║ŽĖ±ĘČć·ĪŻ═¼śėŻ¼ęį╠ōŠĆ2║═3ū¾é╚Č╦³c▀BŠĆ×ķČ╠▀ģĄ├│÷Ą─Šžą╬B×ķ╠ż░Õ┼c═ŲŚU▀BĮėõN─┐ś╦╬╗ų├ā×╗»ĘČć·Ż¼╣Pš▀īóŲõū„×ķįOėŗ─┐ś╦ĪŻ
įö╝ÜģóöĄįOėŗŻ║╚ńłD5╦∙╩ŠŻ¼╩ūŽ╚└¹ė├Äū║╬╝s╩°├³┴Ņīóęčų¬³cŽ┬ų╣³cųąą─l║═╔Žų╣³cųąą─2įO×ķ“═Ļ╚½╣╠Č©”Ż¼╩╣Ųõ▓╗─▄ęŲäėĪŻ╚╗║¾ęį³c1║═³c2×ķŲ³cĘųäeū„2ŚlŠGŠĆŻ¼└¹ė├Äū║╬╝s╩°īó2ŚlŠGŠĆĄ─Ž┬Č╦Ęųäe┼c³c1║═³c2įO×ķ“╣▓³c”Ż¼į┘└¹ė├Äū║╬╝s╩°├³┴Ņīóā╔ŚlŠGŠĆįO×ķ“Ą╚ķL”Ż¼īóā╔ŚlŠGŠĆ╔ŽČ╦³c═¼śėįO×ķ“╣▓³c”ĪŻų┴┤╦Ż«2ŚlŠGŠĆ▒Ń╩Ū╠ż░ÕŚUĄ─┴”▒█Ż¼³c3▒Ń╩Ū╠ż░ÕŚUĄ─╗ž▐Dųąą─ĪŻ
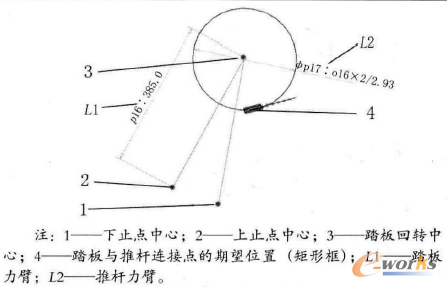
łD5 ųŲäė╠ż░Õęčų¬▌ö╚ļŚl╝■
ū„╦{╔½łAŻ¼īóŲõłAą─┼c³c3įO×ķ“╣▓³c”Ż¼į┌ŠG╔½ų▒ŠĆ╔Žś╦ūó│▀┤ńL1Ż¼ŲõöĄųĄP16Ą─┤¾ąĪļSęŌįOČ©Ż¼į┘ī”łAĄ─ų▒ÅĮ▀Mąąś╦ūóīóŲõ│▀┤ńęį▒Ē▀_╩ĮĄ─ĘĮ╩ĮįOČ©×ķP17=P16×2/2.93Ż¼ę▓Š═╩ŪšfŻ¼łAĄ─░ļÅĮ╩Ūų·┴”Ų„═ŲŚUĄ─┴”▒█Ż¼łA╩Ū═ŲŚU┴”▒█Ą─▀\äė▄ē█EŻ¼łAĄ─┤¾ąĪ×ķ╠ż░Õ┴”▒█/1│²ęįĖ▄ŚU▒╚2.93ĪŻ
┤_Č©╠ż░ÕĄ─Š▀¾wģóöĄŻ║ĘĮĘ©║▄║åå╬Ż¼Š═╩Ū▓╗öÓĄžš{š¹ĪóĖ³Ė─LlĄ─│▀┤ńöĄųĄP16Ą─┤¾ąĪŻ¼Ė³Ė─Ģr³c3Ą─╬╗ų├Ģ■ļSų«ūā╗»Ż¼łAĄ─ų▒ÅĮę▓ļSų«ūā╗»Ż¼«öłA╗Ī═Ļ╚½┬õį┌Šžą╬BĘČć·ĢrŻ¼╠ż░ÕĄ─ģóöĄ▒Ń┐╔ęį┤_Č©Ž┬üĒĪŻ
╚ńłD6╦∙╩ŠŻ║³c4║═³c5×ķłA6┼cŠžą╬Bā╔Č╠▀ģĄ─Į╗³cŻ¼ät³c4║═³c5×ķ▀BĮėõN▀\äėĄ─╔ŽĪóŽ┬ų╣³cŻ¼³c3×ķ╠ż░ÕĄ─╗ž▐Dųąą─Ż¼ų┴┤╦╠ż░ÕĄ─2éĆųžę¬³cĄ─╬╗ų├├„┤_Ż¼┐╔ęįĒś└¹ķ_š╣║¾└mĮ©─Ż╣żū„ĪŻ
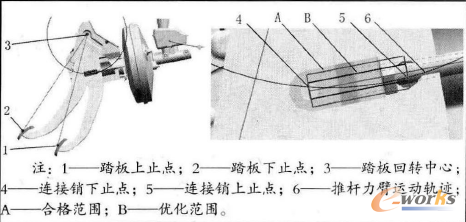
łD6 ╠ż░Õ┼c═ŲŚU▀BĮėõN╬╗ų├┤_Č©
6 ąĪĮY
▒Š╬─═©▀^Ęų╬÷ųŲäė╠ż░ÕįOėŗ▀^│╠Ą─Ė▄ŚU▒╚Īóąą│╠║═╔ŽĪóŽ┬ų╣³cĄ╚ęčų¬Śl╝■Ż¼ęį╝░╠ż░ÕĻPµI│▀┤ńĄ─ā╚į┌ĻPŽĄŻ¼└¹ė├įOėŗ▌oų·▄ø╝■Siemens NXĄ─▓▌łDĘų╬÷Ą─Äū║╬╝s╩°Īó│▀┤ń╝s╩°╝░▒Ē▀_╩Į╣”─▄üĒ┤_Č©ųŲäė╠ż░ÕĄ─ĻPµI│▀┤ńĪŻ▀@ĘN║åå╬Ūę£╩┤_Ą─įOėŗĘĮĘ©┐╔ęįæ¬ė├ė┌Ųõ╦¹▀BŚU▀\äėÖCśŗįOėŗųąŻ¼╠ß╔²įOėŗą¦┬╩ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.hanmeixuan.com/
▒Š╬─ś╦Ņ}Ż║NX▓▌łDĘų╬÷į┌ųŲäė╠ż░ÕįOėŗųąĄ─æ¬ė├
▒Š╬─ŠWųĘŻ║http://www.hanmeixuan.com/html/support/11121519877.html